
BotBuilt (YC W22) automates residential wood framing using robotic arms. I joined as the sole mechanical intern for the second factory buildout and end-effector development, both on aggressive timelines.
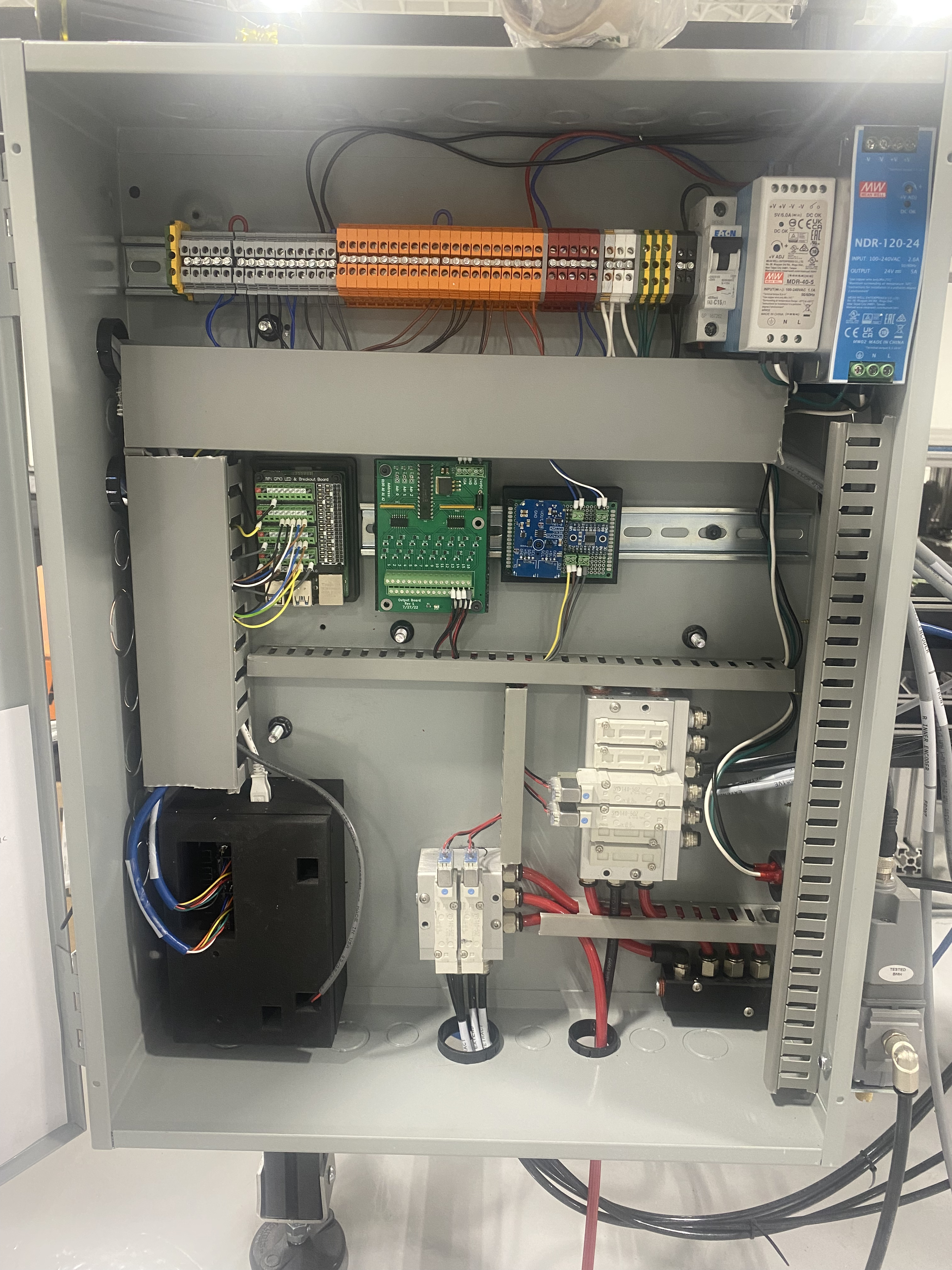
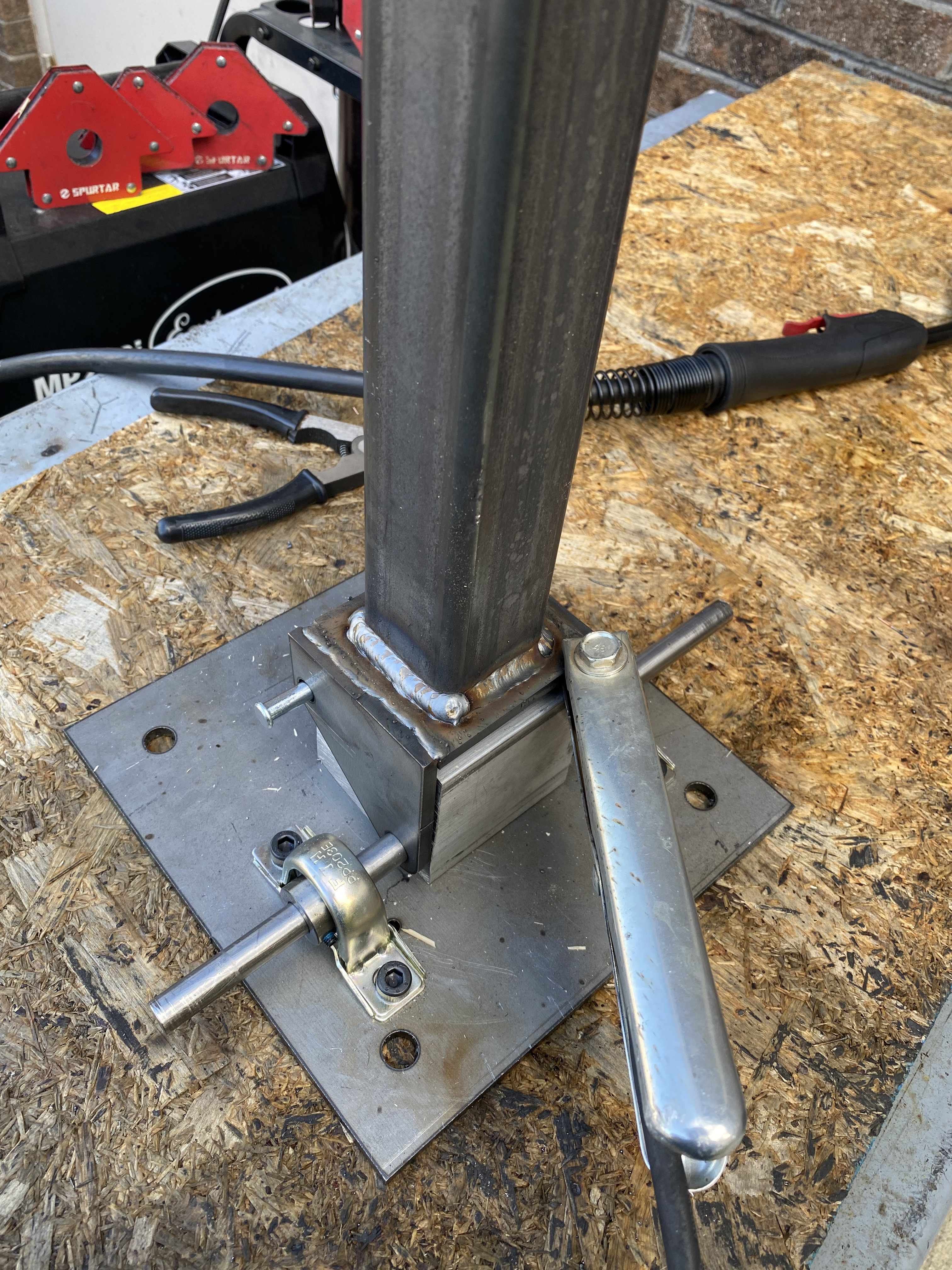
Led mechanical buildout for two months at peak 70-hour weeks. Responsible for 500+ 3D-printed parts, 100 sheet metal parts, RTU installations, pneumatic line runs, and wiring throughout the facility. Self-taught MIG and stick welding on-site.



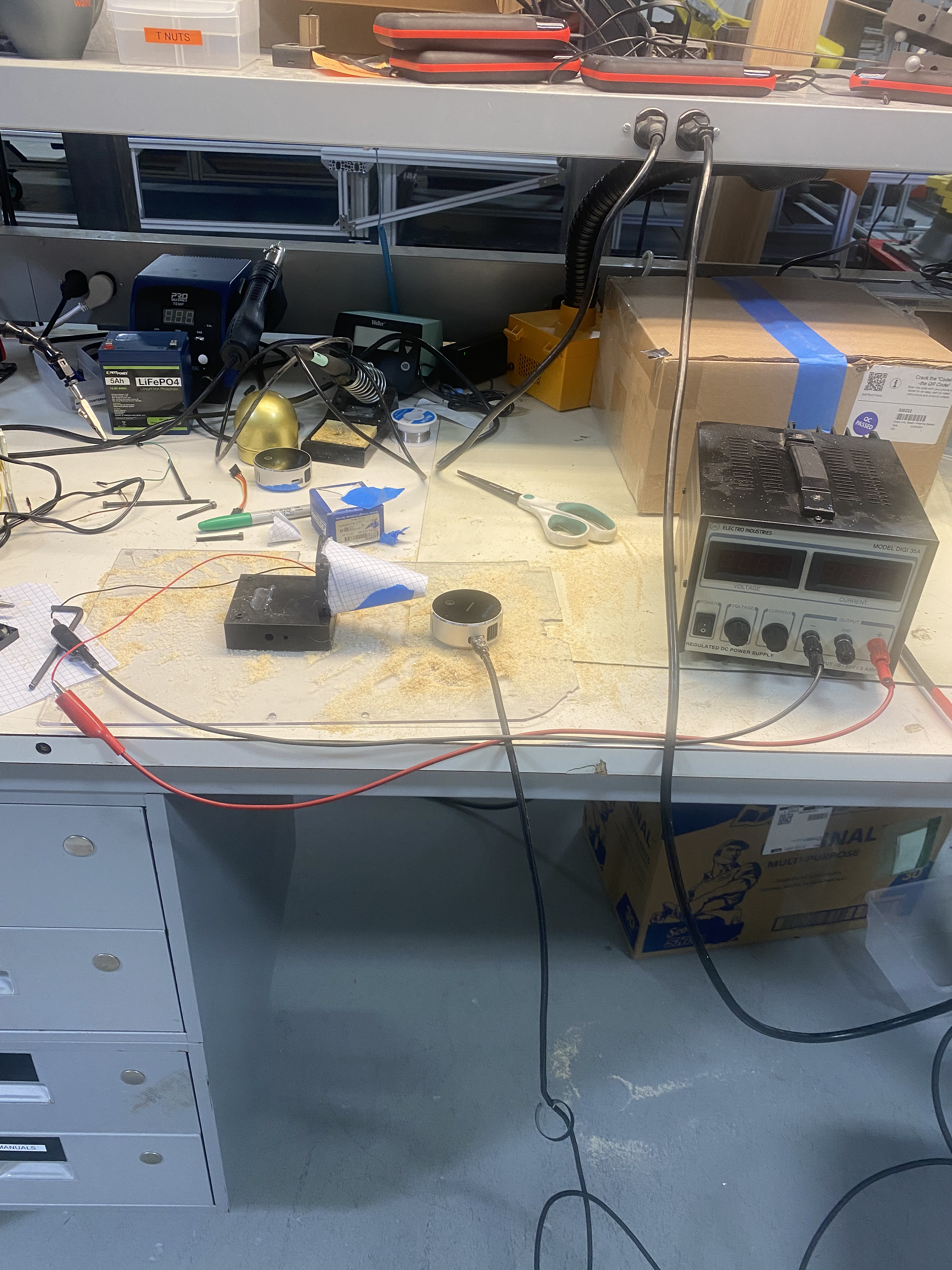
Designed and built an autonomous test fixture to validate end-effector performance and surface mechanical failure modes before they appeared on the robot. The fixture enabled structured root-cause analysis across 5 design iterations, improving reliability on an aggressive production timeline.
Details and imagery withheld under NDA.
Robot cameras fouled with wood dust mid-run. Started with electronic fan + 6 nozzle iterations (paper cone, cardboard, three 3D-printed variants). None produced sufficient airflow at the camera face.
Reworked the pneumatic circuit to free a solenoid port. Prototyped a perforated pneumatic line with hot-glue washers: confirmed it worked, then CAD'd and 3D-printed a final ring-shaped diffuser. Mounted on the robot; in production use.

Factory operational on an aggressive timeline. End-effector reliability improved through structured root-cause analysis and 5 design changes. Camera cleaning device deployed and still in production use.